弊社の活動
フィジカルAI技術の絶大なインパクトを、産業の現場で有効にご活用いただくことを目的として、弊社では、技術開発に限らず広範な努力を重ねております。このために、弊社代表がオープンソース団体momoi.orgを主催するとともに、大学との連携プロジェクトも実施しております。活動の詳細は、momoi.orgのページをご覧ください。
1.製造業の現状調査
多くの製造工場様にご協力いただき、製造工場に関する現地調査を重ねました。これに基づき、
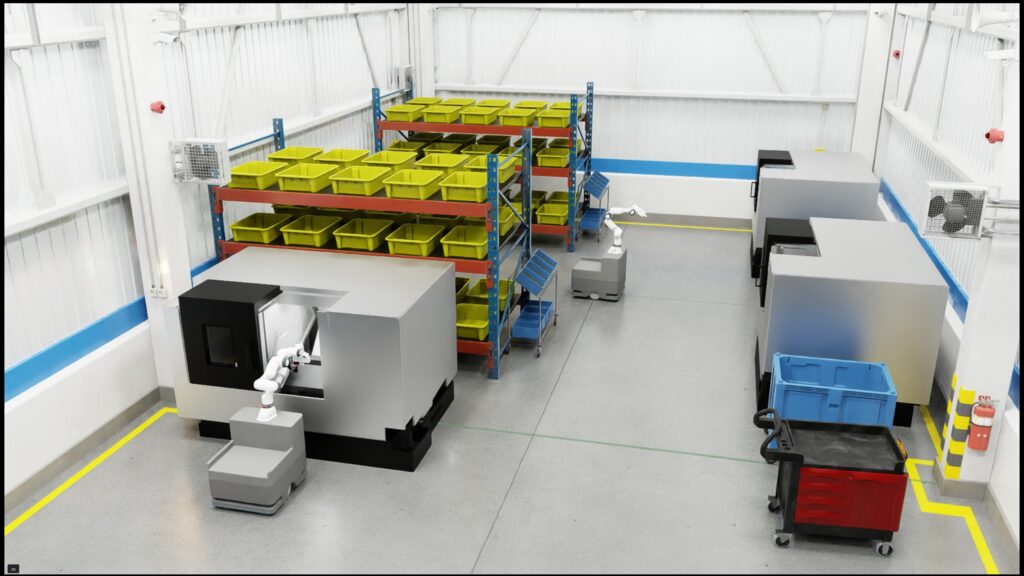
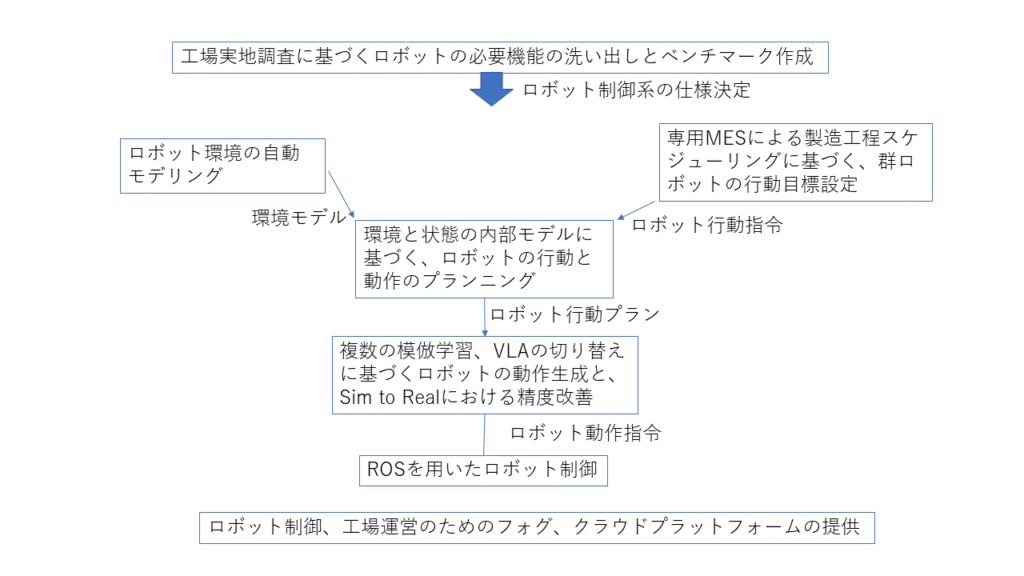
- 工場デジタルツイン環境中に、現実の工場の姿を反映した、仮想工場を構築いたしました。これを@factoryとよんでいます。そこでは、CNC旋盤等の加工機も正確に再現し、プラグイン形式でロボットを導入することにより、仮想環境中でフィジカルAIを用いた工場を、実際に運営することが可能です。その制御プログラムは実ロボット用のものと同一であるため、@factoryを工場の企画、開発に利用することができます。
- 調査に基づいて、フィジカルAIで実行すべきロボット作業種の、現実的なリストを作成しました。これを基礎として、フィジカルAIによるロボット機能のベンチマーク作成と、機能実装の競技化を行っています。これによって、効率的にフィジカルAI技術の開発を行うことが可能になります。
この、@factoryプロジェクトに関して、共同研究中の東京工科大院生が、情報処理学会第88回全国大会において、学生奨励賞を受賞しました。
2.フィジカルAI技術要素の開発
- TurtleBot3 Lime制御ソフトウェア開発
ROS標準ロボットTurtleBot3シリーズにおいて、最初にエッジGPUと6自由度アームを備えたモデルがLimeです。Momoi.orgでは、その開発の初期段階からかかわり、サンプルコードを開発しました。 - NVIDIA Isaacに基づく、模倣学習、VLA実行と講習コンテンツ作成
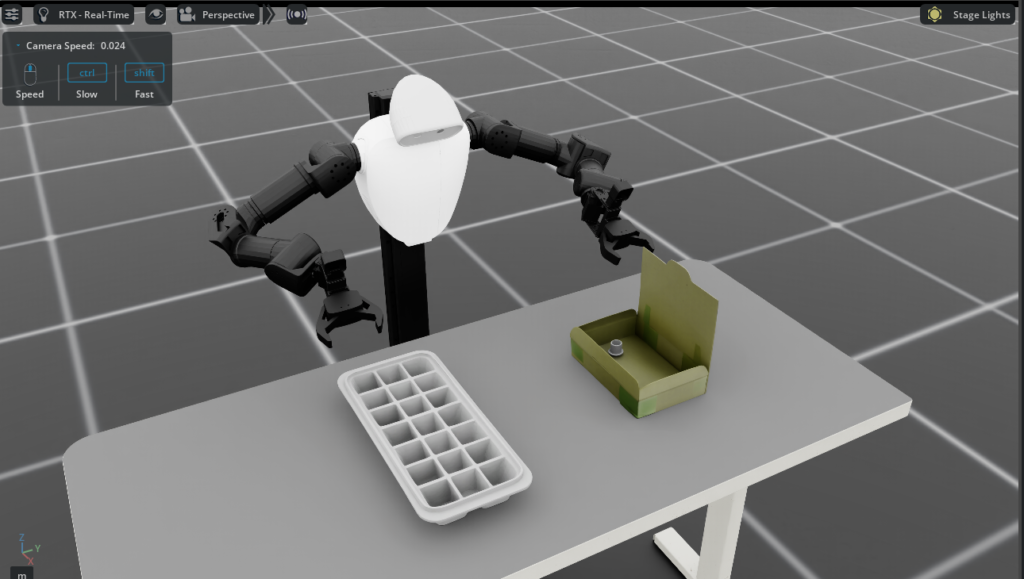
VRゴーグルによる教示を用いた模倣学習、VLA学習フェーズ、デジタルツインによる推論フェーズ、実機動作(Sim to real)を通しで行えるようにしました。
また、Isaac Sim,Isaac Lab、Isaac Mimic、Isaac GR00T、Isaac Lab-Arenaの検証と、クラウドから利用できる教材コンテンツの作成を行っています。 - 双腕ロボット開発
Hugging Face SO-ARMをベースに、きわめて安価な双腕ロボットを開発しました。研究、開発ツールとして最適です。海外とも連携し、Isaac Sim環境でシミュレーションできるようにする準備を進めています。
3.デジタルツイン環境を用いたフィジカルAI活用企画立案環境の創成
@factory環境とフィジカルAI技術の開発により、具体的な自動化検討が可能になりました。たとえば、実際に操業中の工場や建築予定の工場について、デジタルツイン環境に写し取った仮想工場中でロボットを運用することにより、どのような改善が可能になるか、最適な方法は何であるか、効果が目に見え、かつ、数量的客観性を持つ形式で試すことができます。
このプロセスは、2つの局面で役に立ちます。当然ながら、実際の生産性向上作業を効果的に進めることができるようになります。また、たとえば新人研修において、工場の企画、設計を行ってみることは、生産性向上の勘所をつかむうえで大変効果的であると期待されます。
4.研究活動
弊社では、さらに、このようなオープンソースの上で、実際の工場の作業工程でフィジカルAIを活用するための技術の研究・開発を、大学と連携して推進しています